Publications
Books Edited
-
Distributed Autonomous Robotic Systems, 17th International Symposium.
Alexandra Nilles, Kirstin H. Petersen, Tin Lun Lam, Amanda Prorok, Michael Rubenstein, and Michael Otte (editors).
Springer Proeedings in Advanced Robotics.
Springer Cham.
2025.
Book.
BibTeX.
@proceedings{DarsBook25,
editor = {Alexandra Nilles and Kirstin H. Petersen and Tin Lun Lam and Amanda Prorok and Michael Rubenstein and Michael Otte},
title = {Distributed Autonomous Robotic Systems, 17th International Symposium},
series = {Springer Proceedings in Advanced Robotics},
volume = {34},
publisher = {Springer},
year = {2025},
url = {https://link.springer.com/book/10.1007/978-3-032-04584-3},
doi = {3-032-04584-3},
isbn = {978-3-032-04583-6}
}
Close
-
Algorithmic Foundations of Robotics XV, Proceedings of the Fifteenth Workshop on the Algorithmic Foundations of Robotics.
Steven M. LaValle, Jason M. O'Kane, Michael Otte, Dorsa Sadigh, Pratap Tokekar (editors).
Springer Proeedings in Advanced Robotics.
Springer Cham.
2023.
Book.
BibTeX.
@proceedings{WafrBook22,
editor = {Steven M. LaValle and Jason M. O'Kane and Michael Otte and Dorsa Sadigh and Pratap Tokekar},
title = {Algorithmic Foundations of Robotics XV, Proceedings of the Fifteenth Workshop on the Algorithmic Foundations of Robotics},
series = {Springer Proceedings in Advanced Robotics},
volume = {},
publisher = {Springer Cham},
year = {2023},
url = {https://link.springer.com/book/10.1007/978-3-031-21090-7},
doi = {10.1007/978-3-031-21090-7},
isbn = {978-3-031-21089-1}
}
Close
-
Distributed Autonomous Robotic Systems, The 14th International Symposium.
Nikolaus Correll, Mac Schwager, and Michael Otte (editors).
Springer Proceedings in Advanced Robotics.
Springer.
2019.
Book.
BibTeX.
@proceedings{darsBook18,
editor = {Nikolaus Correll and
Mac Schwager and
Michael W. Otte},
title = {Distributed Autonomous Robotic Systems, The 14th International Symposium}
series = {Springer Proceedings in Advanced Robotics},
volume = {9},
publisher = {Springer},
year = {2019},
url = {https://doi.org/10.1007/978-3-030-05816-6},
doi = {10.1007/978-3-030-05816-6},
isbn = {978-3-030-05815-9}
}
Close
Journal Papers (Peer Reviewed)
-
Multi-Robot Exploration for the CADRE Mission.
Sharan Nayak, Grace Lim, Federico Rossi, Michael Otte, and Jean-Pierre de la Croix.
Autonomous Robots.
2025.
Paper.
BibTeX.
@Article{Nayak.etal.AURO25,
author={Sharan Nayak and Grace Lim and Federico Rossi and Michael Otte and Jean-Pierre de la Croix},
journal={Autonomous Robots.},
title={Multi-robot exploration for the CADRE mission.},
year={2025},
volume={49},
number={17},
doi={10.1007/s10514-025-10199-3},
publisher={Springer}
}
Close
-
Simultaneous Motion Replanning and Gravity Model Refinement Near Small Solar System Bodies.
Aditya Savio Paul and Michael Otte.
AIAA Journal of Aerospace Information Systems.
2023.
Paper.
BibTeX.
@Article{Paul.Otte.JAIS23,
author={Aditya Savio Paul and Michael Otte},
journal={AIAA Journal of Aerospace Information Systems},
title={Simultaneous motion replanning and gravity model refinement near small solar system bodies},
year={2023},
volume={Accepted},
number={(to appear)},
}
Close
-
A Heuristic-Guided Dynamical Multi-Rover Motion Planning Framework for Planetary Surface Missions.
Sharan Nayak, Michael Paton, and Michael Otte.
IEEE Robotics and Automation Letters.
Volume 8, Number 5.
2023.
Paper.
Preprint.
BibTeX.
@Article{Nayak.etal.RAL23,
author={Sharan Nayak and Michael Paton and Michael Otte},
journal={IEEE Robotics and Automation Letters},
title={A Heuristic-Guided Dynamical Multi-Rover Motion Planning Framework for Planetary Surface Missions},
year={2023},
volume={8},
number={5},
}
Close
-
Distributed Task Allocation Algorithms for Multi-Agent Systems With Very Low Communication.
Akshay Bapat, Bharath Reddy Bora, Jeffrey W. Herrmann, Shapour Azarm, Huan Xu, and Michael Otte.
IEEE Access.
Volume 10.
2022.
Paper.
BibTeX.
@Article{Bapat.etal.A2022,
author={Bapat, Akshay and Bora, Bharath Reddy and Herrmann, Jeffrey W. and Azarm, Shapour and Xu, Huan and Otte, Michael W.},
journal={IEEE Access},
title={Distributed Task Allocation Algorithms for Multi-Agent Systems With Very Low Communication},
year={2022},
volume={10},
number={},
pages={124083-124102},
doi={10.1109/ACCESS.2022.3224146}
}
Close
-
Bidirectional Sampling-Based Motion Planning Without Two-Point Boundary Value Solution.
Sharan Nayak and Michael Otte.
IEEE Transactions on Robotics.
Volume 38, Number 6.
2022.
Paper.
Preprint.
BibTeX.
@Article{Nayak.Otte.TRO22,
author={Nayak, Sharan and Otte, Michael W.},
journal={IEEE Transactions on Robotics},
title={Bidirectional Sampling-Based Motion Planning Without Two-Point Boundary Value Solution},
year={2022},
volume={38},
number={6},
pages={3636-3654},
doi={10.1109/TRO.2022.3181947}
}
Close
-
Viscoelastic Fluid-Inspired Swarm Behavior to Reduce Susceptibility to Local Minima: The Chain Siphon Algorithm.
Loy Mcguire, Michael Otte, Tristan Schuler, and Donald Sofge.
IEEE Robotics and Automation Letters.
2022.
Paper.
Preprint.
BibTeX.
@Article{McGuire.etal.RAL22,
author={Mcguire, Loy and Otte, Michael W. and Schuler, Tristan and Sofge, Donald},
journal={IEEE Robotics and Automation Letters},
title={Viscoelastic Fluid-Inspired Swarm Behavior to Reduce Susceptibility to Local Minima: The Chain Siphon Algorithm},
year={2022},
volume={7},
number={2},
pages={1000-1007},
doi={10.1109/LRA.2021.3128705}
}
Close
-
Communication-Aware Multi-Agent Metareasoning for Decentralized Task Allocation.
Estefany Carrillo, Suyash Yeotikar, Sharan Nayak, Khalid M. Jaffar, Shapour Azarm, Jeffrey W. Herrmann, Michael Otte, and Huan Xu.
IEEE Access.
Volume 9.
2021.
Paper.
BibTeX.
@Article{Carrillo.elal.A2021,
author={Estefany Carrillo and Suyash Yeotikar and Sharan Nayak and Khalid M. Jaffar and Shapour Azarm and Jeffrey W. Herrmann and Michael Otte and Huan Xu},
journal={IEEE Access},
title={Communication-Aware Multi-Agent Metareasoning for Decentralized Task Allocation},
volume={9},
number={},
pages={98712-98730},
doi={10.1109/ACCESS.2021.3096229}
}
Close
-
Path-Based Sensors: Paths as Sensors, Bayesian Updates, and Shannon Information Gathering.
Michael Otte and Don Sofge.
IEEE Transactions on Automation Science and Engineering.
Volume 18, Number 3.
2021.
Paper.
Preprint.
BibTeX.
@Article{Otte.Sofge.TASE21,
author={Michael Otte and Don Sofge},
journal={IEEE Transactions on Automation Science and Engineering},
title={Path-Based Sensors: Paths as Sensors, Bayesian Updates, and Shannon Information Gathering},
year={2021},
volume={18},
number={3},
pages={946-967},
doi={10.1109/TASE.2021.3067628},
}
Close
-
Metareasoning Structures, Problems, and Modes for Multiagent Systems: A Survey.
Samuel T. Langlois, Oghenetekevwe Akoroda, Estefany Carrillo, Jeffrey Herrmann, Shapour Azarm, Huan Xu, and Michael W Otte.
IEEE Access.
Volume 8.
2020.
Paper.
BibTeX.
@Article{Langlois.etal.A2020,
author={Samuel T Langlois and Oghenetekevwe Akoroda and Estefany Carrillo and Jeffrey Herrmann and Shapour Azarm and Huan Xu and Michael W Otte},
journal={IEEE Access},
title={Metareasoning Structures, Problems, and Modes for Multiagent Systems: A Survey},
year={2020},
volume={8},
pages={183080-183089},
}
Close
-
Experimental Comparison of Decentralized Task Allocation Algorithms under Imperfect Communication.
Sharan Nayak, Suyash Yeotikar, Estefany Carrillo, Eliot Rudnick-Cohen, Mohamed Khalid M Jaffar, Ruchir Patel, Shapour Azarm, Jeffrey Herrmann, Huan Xu, and Michael W Otte.
IEEE Robotics and Automation Letters.
Volume 5, Number 2.
2020.
Preprint.
BibTeX.
@Article{Nayak.etal.RAL19,
author={Sharan Nayak and Suyash Yeotikar and Estefany Carrillo and Eliot Rudnick-Cohen and Mohamed Khalid M Jaffar and Ruchir Patel and Shapour Azarm and Jeffrey Herrmann and Huan Xu and Michael W Otte},
journal={IEEE Robotics and Automation Letters},
title={Experimental Comparison of Decentralized Task Allocation Algorithms under Imperfect Communication},
year={2020},
volume={5},
number={2},
pages={572-579},
}
Close
-
Auctions for Multi-Robot Task Allocation in Communication Limited Environments.
Michael Otte, Michael Kuhlman, and Donald Sofge.
Autonomous Robots.
Volume 44, Number 3.
2020.
Preprint.
BibTeX.
@article{otte.etal.AURO19,
title={Auctions for multi-robot task allocation in communication limited environments},
author={Otte, Michael and Kuhlman, Michael J and Sofge, Donald},
journal={Autonomous Robots},
volume={44},
number={3},
pages={547--584},
year={2020},
publisher={Springer}
}
Close
-
LSwarm: Efficient Collision Avoidance for Large Swarms With Coverage Constraints in Complex Urban Scenes.
Senthil Hariharan Arul, Adarsh Jagan Sathyamoorthy, Shivang Patel, Michael Otte, Huan Xu, Ming C. Lin, Dinesh Manocha.
IEEE Robotics and Automation Letters.
Volume 4, Number 4.
2019.
Preprint.
BibTeX.
@Article{Arul.etal.RAL19,
author={Senthil Hariharan Arul and Adarsh Jagan Sathyamoorthy and Shivang Patel and Michael Otte and Huan Xu and Ming C Lin and Dinesh Manocha},
journal={IEEE Robotics and Automation Letters},
title={LSwarm: Efficient Collision Avoidance for Large Swarms With Coverage Constraints in Complex Urban Scenes},
year={2019},
volume={4},
number={4},
pages={3940-3947},
doi={10.1109/LRA.2019.2929981},
ISSN={2377-3774},
month={Oct},
}
Close
-
An Emergent Group Mind Across a Swarm of Robots: Collective Cognition and Distributed Sensing via a Shared Wireless Neural Network.
Michael Otte.
The International Journal of Robotics Research.
Volume 37, Number 9.
2018.
Paper.
Preprint.
BibTeX.
@article{Otte.IJRR18,
author = {Michael Otte},
title ={An emergent group mind across a swarm of robots: Collective cognition and distributed sensing via a shared wireless neural network},
journal = {The International Journal of Robotics Research},
volume = {37},
number = {9},
pages = {1017--1061},
year = {2018},
doi = {10.1177/0278364918779704},
URL = {https://doi.org/10.1177/0278364918779704},
eprint = {https://doi.org/10.1177/0278364918779704}
}
Close
-
Dynamic Teams of Robots as Ad Hoc Distributed Computers: Reducing the Complexity of Multi-Robot Motion Planning via Sub-Space Selection.
Michael Otte and Nikolaus Correll.
Autonomous Robots.
Volume 42, Number 8.
2018.
Paper.
Preprint.
BibTeX.
@article{Otte.Correll.AR18,
author="Otte, Michael and Correll, Nikolaus",
title="Dynamic teams of robots as ad hoc distributed computers: reducing the complexity of multi-robot motion planning via subspace selection",
journal="Autonomous Robots",
year="2018",
month="Dec",
day="01",
volume="42",
number="8",
pages="1691--1713",
issn="1573-7527",
doi="10.1007/s10514-018-9714-9",
url="https://doi.org/10.1007/s10514-018-9714-9"
}
Close
-
Competitive Target Search with Multi-Agent Teams: Symmetric and Asymmetric Communication Constraints.
Michael Otte, Michael Kuhlman, and Donald Sofge.
Autonomous Robots.
Volume 42, Number 6.
2018.
Paper.
Preprint.
BibTeX.
@article{Otte.etal.AR17,
author="Otte, Michael and Kuhlman, Michael and Sofge, Donald",
title="Competitive target search with multi-agent teams: symmetric and asymmetric communication constraints",
journal="Autonomous Robots",
year="2018",
month="Aug",
day="01",
volume="42",
number="6",
pages="1207--1230",
issn="1573-7527",
doi="10.1007/s10514-017-9687-0",
url="https://doi.org/10.1007/s10514-017-9687-0"
}
Close
-
Multipass Target Search in Natural Environments.
Michael Kuhlman, Michael Otte, Donald Sofge, Satyandra K. Gupta.
Sensors.
Volume 17, Issue 11.
2017.
Paper.
Preprint.
BibTeX.
@article{Kuhlman.S17,
AUTHOR = {Kuhlman, Michael J. and Otte, Michael W. and Sofge, Donald and Gupta, Satyandra K.},
TITLE = {Multipass Target Search in Natural Environments},
JOURNAL = {Sensors},
VOLUME = {17},
YEAR = {2017},
NUMBER = {11},
URL = {http://www.mdpi.com/1424-8220/17/11/2514},
ISSN = {1424-8220},
DOI = {10.3390/s17112514}
}
Close
-
Effcient Collision Checking in Sampling-based Motion Planning via Safety Certificates.
Joshua Bialkowski, Michael Otte, Sertac Karaman, and Emilio Frazzoli.
The International Journal of Robotics Research.
Volume 29, Issue 7.
2016. p. 767-796.
Preprint.
BibTeX.
@article{Bialkowski.Otte.IJRR16,
title = {Efficient collision checking in sampling-based motion planning via safety certificates},
volume = {35},
number = {7},
pages = {767-796},
year = {2016},
doi = {10.1177/0278364915625345},
URL = {http://ijr.sagepub.com/cgi/content/abstract/35/7/767},
eprint = {http://ijr.sagepub.com/cgi/reprint/35/7/767},
journal = {The International Journal of Robotics Research}
}
Close
-
RRTX: Asymptotically Optimal Single-Query Sampling-Based Motion Planning with Quick Replanning.
Michael Otte and Emilio Frazzoli.
The International Journal of Robotics Research.
Volume 29, Issue 7.
2016. p. 797-822.
Preprint.
BibTeX.
Code.
@article{Otte.Frazzoli.IJRR16,
author = "Michael Otte and Emilio Frazzoli",
title = "{RRTX}: Asymptotically optimal single-query sampling-based motion planning with quick replanning",
journal = "The International Journal of Robotics Research",
volume = {35},
number = {7},
pages = {797-822},
doi = {10.1177/0278364915594679},
URL = {http://ijr.sagepub.com/cgi/content/abstract/35/7/797},
eprint = {http://ijr.sagepub.com/cgi/reprint/35/7/797},
year = {2016}
}
Close
-
C-FOREST: Parallel Shortest-Path Planning with Super Linear Speedup.
Michael Otte and Nikolaus Correll.
IEEE Transactions on Robotics.
Volume 29, Issue 3.
June, 2013. p. 798-806.
Preprint.
BibTeX.
Code.
@article{otte_ieeetro13,
author = "Michael Otte and Nikolaus Correll",
title = "{C-FOREST}: Parallel Shortest-Path Planning with Super Linear Speedup",
journal = "IEEE Transactions on Robotics",
volume = "29",
issue = "3",
pages = "798-806",
month = "June",
year = "2013"
}
Close
-
Path Planning in Image Space for Autonomous Robot Navigation in Unstructured Environments.
Michael Otte, Scott G. Richardson, Jane Mulligan, Gregory Grudic.
Journal of Field Robotics.
Volume 26, Issue 2.
February, 2009. p. 212-240.
Paper.
Preprint.
BibTeX.
@article{otte_jfr09,
author = "Michael Otte and Scott Richardson and Jane Mulligan and Gregory Grudic",
title = "Path Planning in Image Space for Autonomous Robot Navigation in Unstructured Environments",
journal = "Journal of Field Robotics",
volume = "26",
issue = "2",
year = "2009",
pages = "212-240"
}
Close
Conference Papers (Peer Reviewed)
'♠' denotes peer reviewed conference papers that became book chapters
-
Control Barrier Functions via Minkowski Operations for Safe Navigation among Polytopic Sets.
Yi-Hsuan Chen, Shuo Liu, Wei Xiao, Calin Belta, and Michael Otte.
In IEEE Conference on Decision and Control (CDC).
Rio de Janeiro, Brazil, 2025.
BibTeX.
@inproceedings{Chen.etal.CDC25,
title={Control Barrier Functions via Minkowski Operations for Safe Navigation among Polytopic Sets},
author={Yi-Hsuan Chen and Shuo Liu and Wei Xiao and Calin Belta and Michael Otte},
booktitle={IEEE Conference on Decision and Control (CDC)},
year={2025},
organization={IEEE}
}
Close
-
Valuing Attrition in a Fleet of Robots Used as Path-Based Sensors for Gathering Information in a Communications Restricted Environment.
Loy McGuire, Michael Otte, Donald Sofge.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Abu Dhabi, UAE, 2024.
[Acceptance rate 47%].
Paper.
BibTeX.
@inproceedings{McGuire.etal.IROS24,
title={Valuing Attrition in a Fleet of Robots Used as Path-Based Sensors for Gathering Information in a Communications Restricted Environment.},
author={Loy McGuire and Michael Otte and Donald Sofge},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year={2024)},
organization={IEEE}
}
Close
-
Assembly Sequence Optimization for Space Structures.
Dalan Loudermilk, John Cooper, and Michael W Otte.
In AIAA Accelerating Space Commerce, Exploration, and New Discovery (ASCEND). Las Vegas, Nevada.
Paper.
BibTeX.
@inproceedings{Loudermilk.etal.ASCEND24,
title={Assembly Sequence Optimization for Space Structures},
author={Dalan Loudermilk and John Cooper and Michael W Otte},
booktitle={AIAA Science and Technology Forum (SciTech)},
year={2024)},
organization={AIAA}
}
Close
-
Enhancing Search and Rescue Capabilities in Hazardous Communication-Denied Environments through Path-Based Sensors with Backtracking.
Alexander Mendelsohn, Don Sofge, and Michael Otte.
In International Conference on Autonomous Agents and Multiagent Systems (AAMAS). Extended abstract.
Auckland, New Zealand, 2024.
[Acceptance rate 45.1%]
Paper.
BibTeX.
@inproceedings{Mendelsohn.etal.AAMAS04,
title={Enhancing Search and Rescue Capabilities in Hazardous Communication-Denied Environments through Path-Based Sensors with Backtracking},
author={Alexander Mendelsohn and Don Sofge and Michael Otte},
note={extended abstract},
booktitle={International Conference on Autonomous Agents and Multiagent Systems (AAMAS).},
year={2024)},
organization={IFAAMAS}
}
Close
-
Trajectory Tracking while Stabilizing an Inverted Pendulum on a Quadcopter Using Adaptive Model-Predictive Control.
Han Yang, Mohamed Khalid M Jaffar, and Michael W. Otte.
In AIAA Science and Technology Forum (SciTech).
Orlando, USA, 2024.
Paper.
BibTeX.
@inproceedings{Yang.etal.SciTech04,
title={Trajectory Tracking while Stabilizing an Inverted Pendulum on a Quadcopter Using Adaptive Model-Predictive Control},
author={Han Yang and Mohamed Khalid M Jaffar and Michael W Otte},
booktitle={AIAA Science and Technology Forum (SciTech)},
year={2024)},
organization={AIAA}
}
Close
-
Exploration-Exploitation Active Learning of Gaussian Process Surrogates for Adaptive Sampling.
George Kontoudis and Michael Otte.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Detroit, USA, 2023.
[Acceptance rate 43%]
Paper.
BibTeX.
@inproceedings{Kontoudis.Otte.IROS23,
title={Exploration-Exploitation Active Learning of Gaussian Process Surrogates for Adaptive Sampling},
author={George Kontoudis and Michael Otte},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). },
year={2023)},
organization={IEEE/RSJ}
}
Close
-
Closed-Form Active Learning using Expected Variance Reduction of Gaussian Process Surrogates for Adaptive Sampling.
George Kontoudis and Michael Otte.
In American Control Conference (ACC).
San Diego, USA, 2023.
Paper.
BibTeX.
@inproceedings{Kontoudis.Otte.ACC23,
title={Closed-Form Active Learning using Expected Variance Reduction of Gaussian Process Surrogates for Adaptive Sampling},
author={George Kontoudis and Michael Otte},
booktitle={American Control Conference (ACC)},
year={2023},
organization={American Automatic Control Council}
}
Close
-
Low-Level Controller in Response to Changes in Quadrotor Dynamics.
Jae-Kyung Cho, Chan Kim, Mohamed Khalid M Jaffar, Michael Otte, Seong-Woo Kim.
In IEEE International Conference on Robotics and Automation (ICRA).
London, UK, 2023.
[Acceptance rate 43%]
Preprint.
BibTeX.
@inproceedings{JaeKyung.etal.ICRA2023,
title={Low-level controller in response to changes in quadrotor dynamics},
author={Jae-Kyung Cho and Chan Kim and Mohamed Khalid M Jaffar and Michael W Otte and Seong-Woo Kim},
booktitle={IEEE International Conference on Robotics and Automation (ICRA)},
year={2023},
organization={IEEE}
}
Close
-
Distributed Multi-Robot Information Gathering using Path-Based Sensors in Entropy-Weighted Voronoi Regions.
Alkesh K. Srivastava, George P. Kontoudis, Donald Sofge, and Michael Otte.
International Symposium on Distributed Autonomous Robotic Systems (DARS).
Montbéliard, France, 2022.
Paper.
BibTeX.
@inproceedings{Srivastava.etal.DARS22,
author = "Alkesh Kumar Srivastava and George P Kontoudis and Donald Sofge and and Michael Otte",
title = "Distributed Multi-Robot Information Gathering using Path-Based Sensors in Entropy-Weighted Voronoi Regions",
booktitle = "International Symposium on Distributed Autonomous Robotic Systems (DARS)",
address = "Montb\'{e}liard, France",
year = "2022"
}
Close
-
PiP-X: Funnel-based Online Feedback Motion Planning/Replanning in Dynamic Environments.
Mohamed Khalid M. Jaffar and Michael Otte.
International Workshop on the Algorithmic Foundations of Robotics (WAFR).
College Park, USA, 2022.
[Acceptance rate 56%]
Paper.
BibTeX.
@inproceedings{Khalid.Otte.WAFR22,
author = "Mohamed Khalid M Jaffar and Michael Otte. ",
title = "PiP-X: Funnel-based Online Feedback Motion Planning/Replanning in Dynamic Environments",
booktitle = "International Workshop on the Algorithmic Foundations of Robotics (WAFR)",
address = "College Park, USA",
year = "2022"
}
Close
♠ Also appeared as a chapter in the book:
Algorithmic Foundations of Robotics XV,
132--148.
2023.
BibTeX.
@InProceedings{Khalid.Otte.SPAR23,
author="Jaffar, Mohamed Khalid M. and Otte, Michael",
editor="LaValle, Steven M.
and O'Kane, Jason M.
and Otte, Michael
and Sadigh, Dorsa
and Tokekar, Pratap",
title="PiP-X: Funnel-Based Online Feedback Motion Planning/Replanning in Dynamic Environments",
booktitle="Algorithmic Foundations of Robotics XV",
year="2023",
publisher="Springer International Publishing",
address="Cham",
pages="132--148",
isbn="978-3-031-21090-7"
}
Close
-
Decentralized Robot Swarm Clustering: Adding Resilience to Malicious Masquerade Attacks.
Mitali Gandhe and Michael Otte.
International Workshop on the Algorithmic Foundations of Robotics (WAFR).
College Park, USA, 2022.
[Acceptance rate 56%]
Paper.
BibTeX.
@inproceedings{Gandhe.Otte.WAFR22,
author = "Mitali Gandhe and Michael Otte. ",
title = "Decentralized Robot Swarm Clustering: Adding Resilience to Malicious Masquerade Attacks",
booktitle = "International Workshop on the Algorithmic Foundations of Robotics (WAFR)",
address = "College Park, USA",
year = "2022"
}
Close
♠ Also appeared as a chapter in the book:
Algorithmic Foundations of Robotics XV,
98--114.
2023.
BibTeX.
@InProceedings{Gandhe.Otte.SPAR23,
author="Gandhe, Mitali and Otte, Michael",
editor="LaValle, Steven M.
and O'Kane, Jason M.
and Otte, Michael
and Sadigh, Dorsa
and Tokekar, Pratap",
title="Decentralized Robot Swarm Clustering: Adding Resilience to Malicious Masquerade Attacks",
booktitle="Algorithmic Foundations of Robotics XV",
year="2023",
publisher="Springer International Publishing",
address="Cham",
pages="98--114",
isbn="978-3-031-21090-7"
}
Close
-
Multi-Agent Ergodic Coverage in Urban Environments.
Shivang Patel, Senthil Hariharan, Pranav Dhulipala, Ming C Lin, Dinesh Manocha, Huan Xu, and Michael Otte.
In IEEE International Conference on Robotics and Automation (ICRA).
Xi'an, China, 2021.
[Acceptance rate 49%]
Paper.
BibTeX.
@inproceedings{Patel.etal.ICRA2021,
title={Multi-Agent Ergodic Coverage in Urban Environments},
author={Shivang Patel and Senthil Hariharan and Pranav Dhulipala and Ming C Lin and Dinesh Manocha and Huan Xu and Michael Otte},
booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},
year={2021},
organization={IEEE}
}
Close
-
Sailing a Boat Through a Macroscopic Smart-Fluid Composed of a Robot Swarm.
Paul Motter, Zachary Hoover, and Michael Otte.
International Symposium on Experimental Robotics (ISER).
La Valletta, Malta, 2020.
[Acceptance rate 50%]
Paper.
BibTeX.
@inproceedings{Motter.otte.ISER20,
author = "Paul Motter and Zachary Hoover and Michael Otte",
title = "Sailing a Boat Through a Macroscopic Smart-Fluid Composed of a Robot Swarm",
booktitle = "International Symposium on Experimental Robotics (ISER)",
address = "La Valletta, Malta",
year = "2020"
}
Close
♠ Also appeared as a chapter in the book:
Experimental Robotics,
424--435.
2021.
BibTeX.
@InProceedings{Motter.etal.SPAR21,
author="Motter, Paul and Hoover, Zachary and Otte, Michael",
editor="Siciliano, Bruno and Laschi, Cecilia and Khatib, Oussama",
title="Sailing a Boat Through a Macroscopic Smart-Fluid Composed of a Robot Swarm",
booktitle="Experimental Robotics",
year="2021",
publisher="Springer International Publishing",
address="Cham",
pages="424--435",
isbn="978-3-030-71151-1"
}
Close
-
RAPID: An Algorithm for Quick Replanning under Changed Dynamical Constraints.
Sharan Nayak and Michael Otte.
International Symposium on Experimental Robotics (ISER).
La Valletta, Malta, 2020.
[Acceptance rate 50%]
Paper.
BibTeX.
@inproceedings{Nayak.otte.ISER20,
author = "Sharan Nayak and Michael Otte",
title = "RAPID: An Algorithm for Quick Replanning under Changed Dynamical Constraints",
booktitle = "International Symposium on Experimental Robotics (ISER)",
address = "La Valletta, Malta",
year = "2020"
}
Close
♠ Also appeared as a chapter in the book:
Experimental Robotics,
576--588.
2021.
BibTeX.
@InProceedings{Nayak.etal.SPAR21,
author="Nayak, Sharan and Otte, Michael W.",
editor="Siciliano, Bruno and Laschi, Cecilia and Khatib, Oussama",
title="RAPID: An Algorithm for Quick Replanning Under Changed Dynamical Constraints",
booktitle="Experimental Robotics",
year="2021",
publisher="Springer International Publishing",
address="Cham",
pages="576--588",
isbn="978-3-030-71151-1"
}
Close
-
Autonomous Motion Planning for Spacecrafts Near Small Solar System Bodies: Simultaneously Refining the Gravitational Field Model and Re-Planing Gravity Dependent Maneuvers.
Aditya Savio Paul and Michael Otte.
International Astronautical Congress (IAC), 2020.
Paper.
BibTeX.
@inproceedings{Paul.Otte.IAC2020,
title={Autonomous motion planning for spacecrafts near small solar system bodies: simultaneously refining the gravitational field model and re-planing gravity dependent maneuvers},
author={Aditya Savio Paul and Michael Otte},
booktitle={International Astronautical Congress (IAC)},
year={2020},
organization={IAF}
}
Close
-
Decentralized Task Allocation in Multi-Agent Systems Using a Decentralized Genetic Algorithm.
Ruchir Patel, Eliot Rudnick-Cohen, Shapour Azarm, Michael Otte, Huan Xu, Jeffrey W. Herrmann.
In IEEE International Conference on Robotics and Automation (ICRA).
Paris, France, 2020.
[Acceptance rate 44%]
Paper.
BibTeX.
@inproceedings{Patel.etal.ICRA2020,
title={Decentralized Task Allocation in Multi-Agent Systems Using a Decentralized Genetic Algorithm},
author={Ruchir Patel and Eliot Rudnick-Cohen and Shapour Azarm and Michael Otte and Huan Xu and Jeffrey W Herrmann},
booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},
pages={3770-3776},
year={2020},
organization={IEEE}
}
Close
-
Monitoring Access to User Defined Areas with Multi-Agent Team in Urban Environments.
Manas Gupta and Ming C Lin and Dinesh Manocha and Huan Xu and Michael Otte.
In IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS).
New Brunswick, US. 2019.
[Acceptance rate 33%]
Best Paper Award Finalist (1 of 3).
Paper.
BibTeX.
@inproceedings{Gupta.etal.MRS19,
title={Monitoring Access to User Defined Areas with Multi-Agent Team in Urban Environments},
author={Manas Gupta and Ming C Lin and Dinesh Manocha and Huan Xu and Michael Otte},
booktitle={2019 International Symposium on Multi-Robot and Multi-Agent Systems (MRS)},
pages={56--62},
year={2019},
organization={IEEE}
}
Close
-
Path Planning for Information Gathering with Lethal Hazards and No Communication.
Michael Otte, and Donald Sofge.
International Workshop on the Algorithmic Foundations of Robotics (WAFR).
Mérida, Mexico, 2018.
[Acceptance rate 57%]
Paper.
BibTeX.
@inproceedings{otte.sofge.wafr18,
author = "Michael Otte and Donald Sofge",
title = "Path Planning for Information Gathering with Lethal Hazards and No Communication",
booktitle = "International Workshop on the Algorithmic Foundations of Robotics (WAFR)",
address = "Me\'rida, Mexico",
year = "2018"
}
Close
Supplementary Material.
♠ Also appeared as a chapter in the book:
Algorithmic Foundations of Robotics XIII,
389-405.
2020.
BibTeX.
@InProceedings{Otte.etal.SPAR20B,
author="Otte, Michael and Sofge, Donald",
editor="Morales, Marco and Tapia, Lydia and S{\'a}nchez-Ante, Gildardo and Hutchinson, Seth",
title="Path Planning for Information Gathering with Lethal Hazards and No Communication",
booktitle="Algorithmic Foundations of Robotics XIII",
year="2020",
publisher="Springer International Publishing",
address="Cham",
pages="389--405",
isbn="978-3-030-44051-0"
}
Close
-
Optimizing Multiagent Area Coverage Using Dynamic Global Potential Fields.
Rahul Rajan, Michael Otte, and Donald Sofge.
IEEE Symposium on Series on Computational Intelligence (SSCI).
Bangalore, India, 2018.
Paper.
BibTeX.
@inproceedings{rajan.etal.ssci18,
author = "Rahul Rajan and Michael Otte and Donald Sofge",
title = "Optimizing Multiagent Area Coverage Using Dynamic Global Potential Fields",
booktitle = "IEEE Symposium on Series on Computational Intelligence (SSCI)",
address = "Bangalore, India",
year = "2018"
}
Close
-
Multi-Robot Task Allocation with Auctions in Harsh Communication Environments.
Michael Otte, Michael Kuhlman, Donald Sofge.
IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS).
Los Angeles, 2017.
[Acceptance rate 24%]
Paper.
BibTeX.
@inproceedings{otte_mrs17,
author = "Michael Otte and Michael Kuhlman and Donald Sofge",
title = "Multi-Robot Task Allocation with Auctions in Harsh Communication Environments",
booktitle = "International Symposium on Multi-Robot and Multi-Agent Systems",
address = "Los Angeles",
year = "2017"
}
Close
-
Novel Physicomimetic Bio-Inspired Algorithm for Search and Rescue Applications.
Rahul Rajan, Michael Otte, Donald Sofge.
IEEE Symposium on Series on Computational Intelligence (SSCI).
Honolulu, USA, 2017.
Paper.
BibTeX.
@inproceedings{rajan_ssci17,
author = "Rahul Rajan and Michael Otte and Donald Sofge",
title = "Novel Physicomimetic Bio-Inspired Algorithm for Search and Rescue Applications",
booktitle = "IEEE Symposium on Series on Computational Intelligence (SSCI)",
address = "Honolulu",
year = "2017"
}
Close
-
Maximizing Mutual Information for Multipass Target Search in Changing Environments.
Michael Kuhlman, Michael Otte, Donald Sofge, and Satyandra K. Gupta.
IEEE International Conference on Robotics and Automation (ICRA).
Singapore, 2017.
[Acceptance rate 41%]
Paper.
BibTeX.
@inproceedings{Kuhlman_icra17,
author = "Michael Kuhlman and Michael Otte and Donald Sofge and Satyandra K Gupta",
title = "Maximizing Mutual Information for Multipass Target Search in Changing Environments",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
address = "Singapore",
year = "2017"
}
Close
-
Competitive Two Team Target Search Game with Communication Symmetry and Asymmetry.
Michael Otte, Michael Kuhlman, Donald Sofge.
International Workshop on the Algorithmic Foundations of Robotics (WAFR).
San Francisco, USA, 2016.
[Acceptance rate 25%]
Paper.
BibTeX.
@inproceedings{otte_wafr16,
author = "Michael Otte and Michael Kuhlman and Donald Sofge",
title = "Competitive Two Team Target Search Game with Communication Symmetry and Asymmetry",
booktitle = "International Workshop on the Algorithmic Foundations of Robotics (WAFR)",
address = "San Francisco, USA",
year = "2016"
}
Close
♠ Also appeared as a chapter in the book:
Algorithmic Foundations of Robotics XII: Proceedings of the Twelfth Workshop on the Algorithmic Foundations of Robotics,
208--223.
2020.
BibTeX.
@Inbook{Otte.etal.SPAR20,
author="Otte, Michael and Kuhlman, Michael and Sofge, Donald",
editor="Goldberg, Ken and Abbeel, Pieter and Bekris, Kostas and Miller, Lauren",
title="Competitive Two Team Target Search Game with Communication Symmetry and Asymmetry",
bookTitle="Algorithmic Foundations of Robotics XII: Proceedings of the Twelfth Workshop on the Algorithmic Foundations of Robotics",
year="2020",
publisher="Springer International Publishing",
address="Cham",
pages="208--223",
isbn="978-3-030-43089-4",
doi="10.1007/978-3-030-43089-4_14",
}
Close
-
Collective Cognition & Sensing in Robotic Swarms via an Emergent Group Mind.
Michael Otte.
International Symposium on Experimental Robotics (ISER).
Tokyo, Japan, 2016.
Paper.
BibTeX.
@inproceedings{otte_iser16,
author = "Michael Otte",
title = "Collective Cognition \& Sensing in Robotic Swarms via an Emergent Group Mind",
booktitle = "International Symposium on Experimental Robotics (ISER)",
address = "Tokyo, Japan",
year = "2016"
}
Close
♠ Also appeared as a chapter in the book:
2016 International Symposium on Experimental Robotics,
p. 829-840.
2017.
BibTeX.
@InProceedings{otte_spar17,
author="Otte, Michael",
editor="Kuli{\'{c}}, Dana and Nakamura, Yoshihiko and Khatib, Oussama and Venture, Gentiane",
title="Collective Cognition and Sensing in Robotic Swarms via an Emergent Group-Mind",
booktitle="2016 International Symposium on Experimental Robotics",
year="2017",
publisher="Springer International Publishing",
address="Cham",
pages="829--840",
isbn="978-3-319-50115-4"
}
Close
-
Any-Time Path-Planning: Time-Varying Wind Field + Moving Obstacles.
Michael Otte, William Silva, and Eric Frew.
IEEE International Conference on Robotics and Automation (ICRA).
Stockholm, Sweden, 2016.
[Acceptance rate 35%]
Paper.
BibTeX.
@inproceedings{otte_icra16,
author = "Michael Otte and William Silva and Eric Frew",
title = "Any-Time Path-Planning: Time-Varying Wind Field + Moving Obstacles",
booktitle = "IEEE International Conference on Robotics and Automation",
address = "Stockholm, Sweden",
year = "2016"
}
Close
-
RRT-X: Real-Time Motion Planning/Replanning for Environments with Unpredictable Obstacles.
Michael Otte and Emilio Frazzoli.
International Workshop on the Algorithmic Foundations of Robotics (WAFR).
Istanbul, Turkey, 2014.
Paper.
BibTeX.
Code.
@inproceedings{otte_wafr14,
author = "Michael Otte and Emilio Frazzoli",
title = "{RRT-X}: Real-Time Motion Planning/Replanning for Environments with Unpredictable Obstacles",
booktitle = "International Workshop on the Algorithmic Foundations of Robotics (WAFR)",
address = "Istanbul, Turkey",
year = "2014"
}
Close
♠ Also appeared as a chapter in the book:
Algorithmic Foundations of Robotics XI: Selected Contributions of the Eleventh International Workshop on the Algorithmic Foundations of Robotics,
p. 461-478.
2015.
BibTeX.
@Inbook{Otte.STAR15,
author="Otte, Michael and Frazzoli, Emilio",
editor="Akin, Levent H. and Amato, M. Nancy and Isler, Volkan and van der Stappen, Frank A.",
title="RRTX: Real-Time Motion Planning/Replanning for Environments with Unpredictable Obstacles",
bookTitle="Algorithmic Foundations of Robotics XI: Selected Contributions of the Eleventh International Workshop on the Algorithmic Foundations of Robotics",
year="2015",
publisher="Springer International Publishing",
address="Cham",
pages="461--478",
isbn="978-3-319-16595-0",
doi="10.1007/978-3-319-16595-0_27"
}
Close
-
Any-Com Collision Checking: Sharing Certificates in Decentralized Multi-Robot Teams.
Michael Otte, Joshua Bialkowski, Emilio Frazzoli.
In IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China, 2014.
[Acceptance rate 48%]
Paper.
BibTeX.
@inproceedings{otte_ICRA14,
author = "Michael Otte and Joshua Bialkowski and Emilio Frazzoli",
title = "Any-Com Collision Checking: Sharing Certificates in Decentralized Multi-Robot Teams",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
address = "Hong Kong, China",
year = "2014"
}
Close
-
Game Theoretic Controller Synthesis for Multi-Robot Motion Planning Part I: Trajectory based Algorithms.
Minghui Zhu, Michael Otte, Pratik Chaudhari, Emilio Frazzoli.
In IEEE International Conference on Robotics and Automation (ICRA).
Hong Kong, China, 2014.
[Acceptance rate 48%]
Paper.
BibTeX.
@inproceedings{Zhu_ICRA14,
author = "Minghui Zhu and Michael Otte and Pratik Chaudhari and Emilio Frazzoli",
title = "Game theoretic controller synthesis for multi-robot motion planning Part I: Trajectory based algorithms",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
address = "Hong Kong, China",
year = "2014"
}
Close
-
Free-configuration Biased Sampling for Motion Planning.
Joshua Bialkowski, Michael Otte, Emilio Frazzoli.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Tokyo, Japan. November, 2013.
[Acceptance rate 43%]
Proceedings Version.
Errata.
Final Version.
BibTeX.
@inproceedings{bialkowski_IROS13,
author = "Joshua Bialkowski and Michael Otte and Emilio Frazzoli",
title = "Free-configuration Biased Sampling for Motion Planning",
booktitle = "IEEE International Conference on Intelligent Robots and Systems (IROS)",
address = "Tokyo, Japan",
year = "2013"
}
Close
-
Navigation with Foraging.
Michael Otte, Nikolaus Correll, Emilio Frazzoli.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Tokyo, Japan, November, 2013.
[Acceptance rate 43%]
Paper.
BibTeX.
@inproceedings{otte_IROS13,
author = "Michael Otte and Nikolaus Correll and Emilio Frazzoli",
title = "Navigation with Foraging",
booktitle = "IEEE International Conference on Intelligent Robots and Systems (IROS)",
address = "Tokyo, Japan",
year = "2013"
}
Close
-
Efficient Collision Checking in Sampling-based Motion Planning.
Joshua Bialkowski, Sertac Karaman, Michael Otte, and Emilio Frazzoli.
10th International Workshop on the Algorithmic Foundations of Robotics (WAFR).
Cambridge, USA. June, 2012.
Paper.
BibTeX.
@inproceedings{bialkowski_wafr12,
author = "Joshua Bialkowski and Sertac Karaman and Michael Otte and Emilio Frazzoli",
title = "Efficient Collision Checking in Sampling-based Motion Planning",
booktitle = "International Workshop on the Algorithmic Foundations of Robotics (WAFR)",
address = "Cambridge, Massachusetts",
year = "2012"
}
Close
♠ Also appeared as a chapter in the book:
Algorithmic Foundations of Robotics X: Proceedings of the Tenth Workshop on the Algorithmic Foundations of Robotics,
p. 365-380.
2013.
BibTeX.
@Inbook{Bialkowski.STAR13,
author="Bialkowski, Joshua and Karaman, Sertac and Otte, Michael and Frazzoli, Emilio",
editor="Frazzoli, Emilio and Lozano-Perez, Tomas and Roy, Nicholas and Rus, Daniela",
title="Efficient Collision Checking in Sampling-Based Motion Planning",
bookTitle="Algorithmic Foundations of Robotics X: Proceedings of the Tenth Workshop on the Algorithmic Foundations of Robotics",
year="2013",
publisher="Springer Berlin Heidelberg",
address="Berlin, Heidelberg",
pages="365--380",
isbn="978-3-642-36279-8",
doi="10.1007/978-3-642-36279-8_22"
}
Close
-
Any-Com Multi-Robot Path-Planning with Dynamic Teams: Multi-Robot Coordination under Communication Constraints.
Michael Otte and Nikolaus Correll.
12th International Symposium on Experimental Robotics (ISER).
New Delhi, India. December, 2010.
Paper.
BibTeX.
@inproceedings{otte_iser10,
author = "Michael Otte and Nikolaus Correll",
title = "{Any-Com} Multi-Robot Path-Planning with Dynamic Teams: Multi-Robot Coordination under Communication Constraints",
booktitle = "International Symposium on Experimental Robotics (ISER)",
year = "2010"
}
Close
♠ Also appeared as a chapter in the book:
Experimental Robotics: The 12th International Symposium on Experimental Robotics,
p. 743-757.
2014.
BibTeX.
@Inbook{Otte.STAR14,
author="Otte, Michael and Correll, Nikolaus",
editor="Khatib, Oussama and Kumar, Vijay and Sukhatme, Gaurav",
title="Any-Com Multi-robot Path-Planning with Dynamic Teams: Multi-robot Coordination under Communication Constraints",
bookTitle="Experimental Robotics: The 12th International Symposium on Experimental Robotics",
year="2014",
publisher="Springer Berlin Heidelberg",
address="Berlin, Heidelberg",
pages="743--757",
isbn="978-3-642-28572-1",
doi="10.1007/978-3-642-28572-1_51",
url="http://dx.doi.org/10.1007/978-3-642-28572-1_51"
}
Close
-
Any-Com Multi-Robot Path-Planning: Maximizing Collaboration For Variable Bandwidth.
Michael Otte and Nikolaus Correll.
10th International Symposium on Distributed Autonomous Robotic Systems (DARS).
Lausanne, Switzerland. November, 2010.
Paper.
BibTeX.
@inproceedings{otte_dars10,
author = "Michael Otte and Nikolaus Correll",
title = "{Any-Com} Multi-Robot Path-Planning: Maximizing Collaboration for Variable Bandwidth",
booktitle = "International Symposium on Distributed Autonomous Robotics Systems (DARS)",
year = "2010"
}
Close
♠ Also appeared as a chapter in the book:
Distributed Autonomous Robotic Systems,
Springer Tracts in Advanced Robotics,
p. 161-173.
2013.
BibTeX.
@Inbook{Otte2013,
author="Otte, Michael and Correll, Nikolaus",
editor="Martinoli, Alcherio and Mondada, Francesco and Correll, Nikolaus and Mermoud, Gr{\'e}gory and Egerstedt, Magnus and Hsieh, Ani M. and Parker, E. Lynne and St{\o}y, Kasper",
title="Any-Com Multi-robot Path-Planning: Maximizing Collaboration for Variable Bandwidth",
bookTitle="Distributed Autonomous Robotic Systems: The 10th International Symposium",
year="2013",
publisher="Springer Berlin Heidelberg",
address="Berlin, Heidelberg",
pages="161--173",
isbn="978-3-642-32723-0",
doi="10.1007/978-3-642-32723-0_12",
url="http://dx.doi.org/10.1007/978-3-642-32723-0_12"
}
Close
-
Object Interaction Language (OIL): An Intent-based Language for Programming Self-Organized Sensor/Actuator Networks.
D. Sutton, P. Klein, M. Otte and N. Correll.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
October 2010.
[Acceptance rate 46%]
Paper.
BibTeX.
@inproceedings{sutton_iros10,
author = "D. J. Sutton and Peter Klein and Michael Otte and Nikolaus Correll",
title = "Object interaction language (oil): An intent-based language for programming self-organized sensor/actuator networks",
booktitle = "IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
year = "2010"
}
Close
-
Extracting paths from fields built with linear interpolation.
Michael Otte and Gregory Grudic.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
St. Louis, United States. 2009.
[Acceptance rate 58%]
Paper.
BibTeX.
Code.
@inproceedings{otte_iros09,
author = "Michael Otte and Gregory Grudic",
title = "extracting paths from fields built with linear interpolation",
booktitle = "International Conference on Intelligent Robots and Systems (IROS)",
address = "St. Louis",
year = "2009"
}
Close
-
Local path planning in image space for autonomous robot navigation in unstructured environments.
Michael Otte, Scott Richardson, Greg Grudic, and Jane Mulligan.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
San Diego, United States. 2007.
[Acceptance rate 49%]
Paper.
BibTeX.
@inproceedings{otte_iros07,
author = "Michael Otte and Scott Richardson and Jane Mulligan and Gregory Grudic",
title = "Local Path Planning in Image Space for Autonomous Robot Navigation in Unstructured Environments",
booktitle = "International Conference on Intelligent Robots and Systems (IROS)",
address = "San Diego",
month = September,
year = "2007"
}
Close
-
Online learning of multiple perceptual models for navigation in unknown terrain.
Greg Grudic, Jane Mulligan, Michael Otte, and Adam Bates.
6th International Conference on Field and Service Robotics (FSR).
Chamonix, France. 2007.
Paper.
BibTeX.
@inproceedings{grudic_fsr07,
author = "Greg Grudic and Jane Mulligan and Michael Otte and Adam Bates",
title = "Online learning of multiple perceptual models for navigation in unknown terrain",
booktitle = "International Conference on Field and Service Robotics (FSR)",
address = "Chamonix, France",
year = "2007"
}
Close
♠ Also appeared as a chapter in the book:
Field and Service Robotics,
Springer Tracts in Advanced Robotics.
p. 411-420.
2008.
BibTeX.
@inproceedings{grudic_fsr07,
author="Grudic, Greg and Mulligan, Jane and Otte, Michael and Bates, Adam",
editor="Laugier, Christian and Siegwart, Roland",
title="Online Learning of Multiple Perceptual Models for Navigation in Unknown Terrain",
bookTitle="Field and Service Robotics: Results of the 6th International Conference",
year="2008",
publisher="Springer Berlin Heidelberg",
address="Berlin, Heidelberg",
pages="411--420",
isbn="978-3-540-75404-6",
doi="10.1007/978-3-540-75404-6_39",
url="http://dx.doi.org/10.1007/978-3-540-75404-6_39"
}
Close
Conference Extended Abstract/Video (Refereed)
-
C-FOREST: Parallel Shortest-Path Planning with Super Linear Speedup.
Michael Otte and Nikolaus Correll.
International Conference on Automated Planning and Scheduling (Journal Track).
Portsmouth, New Hampshire, USA. 2014.
BibTeX.
@inproceedings{otte_icaps14,
author = "Michael Otte and Nikolaus Correll",
title = "{C-FOREST}: Parallel Shortest-Path Planning with Super Linear Speedup",
booktitle = "International Conference on Automated Planning and Scheduling (Journal Track)",
address = "Portsmouth, New Hampshire",
year = "2014"
}
Close
-
Brain Computer Interfaces.
Aaron Cephers, Ilya Kushnir, Michael Otte, Clayton Lewis, Nikolaus Correll.
AAAI Video Competition.
Atlanta, GA, USA. 2010.
Video.
BibTeX.
@inproceedings{cephers_aaai10,
author = "Aaron Cephers and Ilya Kushnir and Michael Otte and Clayton Lewis and Nikolaus Correll",
title = "Brain Computer Interfaces",
booktitle = "AAAI Video Competition",
address = "Atlanta, GA, USA",
year = "2010"
}
Close
Workshop Papers/Posters (Refereed) and Conference Posters (Refereed)
-
Any-Time Algorithm for the Assembly of Structures with Structural and Motion Planning Constraints.
Dalan Loudermilk and Michael Otte.
In IEEE International Conference on Robotics and Automation, Workshop on Language and Semantics of Task and Motion Planning.
Atlanta, United States, 2025.
BibTeX.
@inproceedings{Loudermilk.Otte.ICRAWLSTMP,
author = "Dalan Loudermilk and Michael Otte",
title = "Any-Time Algorithm for the Assembly of Structures with Structural and Motion Planning Constraints",
booktitle = "IEEE International Conference on Robotics and Automation, Workshop on Language and Semantics of Task and Motion Planning. ",
year = "2025"
}
Close
-
Multi-Defender Single-Attacker Perimeter Defense Game on a Cylinder: Special Case in which the Attacker Starts at the Boundary.
Michael W Otte and Roderich Groß.
In IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS).
Boston, USA, 2023.
BibTeX.
@inproceedings{Otte.Gross.MRS23,
author = "Michael W Otte and Roderich Gro{\ss}",
title = "Multi-Defender Single-Attacker Perimeter Defense Game on a Cylinder: Special Case in which the Attacker Starts at the Boundary",
booktitle = "In IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS)",
year = "2023"
}
Close
-
Enhancing Information Gain and Survival Rates with Path-Based Sensors through Backtracking.
Alexander Mendelsohn, Donald Sofge, Michael W Otte.
In IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS).
Boston, USA, 2023.
BibTeX.
@inproceedings{Mendelsohn.etal.MRS23,
author = "Alexander Mendelsohn and Donald Sofge and Michael W Otte",
title = "Enhancing Information Gain and Survival Rates with Path-Based Sensors through Backtracking",
booktitle = "In IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS)",
year = "2023"
}
Close
-
Path-Based Sensors: Will the Knowledge of Correlation in Random Variables Accelerate Information Gathering?
Alkesh K. Srivastava, George P. Kontoudis, Donald Sofge, and Michael Otte.
In IEEE International Conference on Robotics and Automation, Workshop on Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning.
London, United Kingdom, 2023.
Paper.
arXive Paper.
BibTeX.
@inproceedings{Srivastava.etal.ICRA_CCMRSPCL,
author = "Alkesh K Srivastava and George P Kontoudis and Donald Sofge and Michael Otte",
title = "Path-Based Sensors: Will the Knowledge of Correlation in Random Variables Accelerate Information Gathering?",
booktitle = "In IEEE International Conference on Robotics and Automation, Workshop on Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning",
year = "2023"
}
Close
-
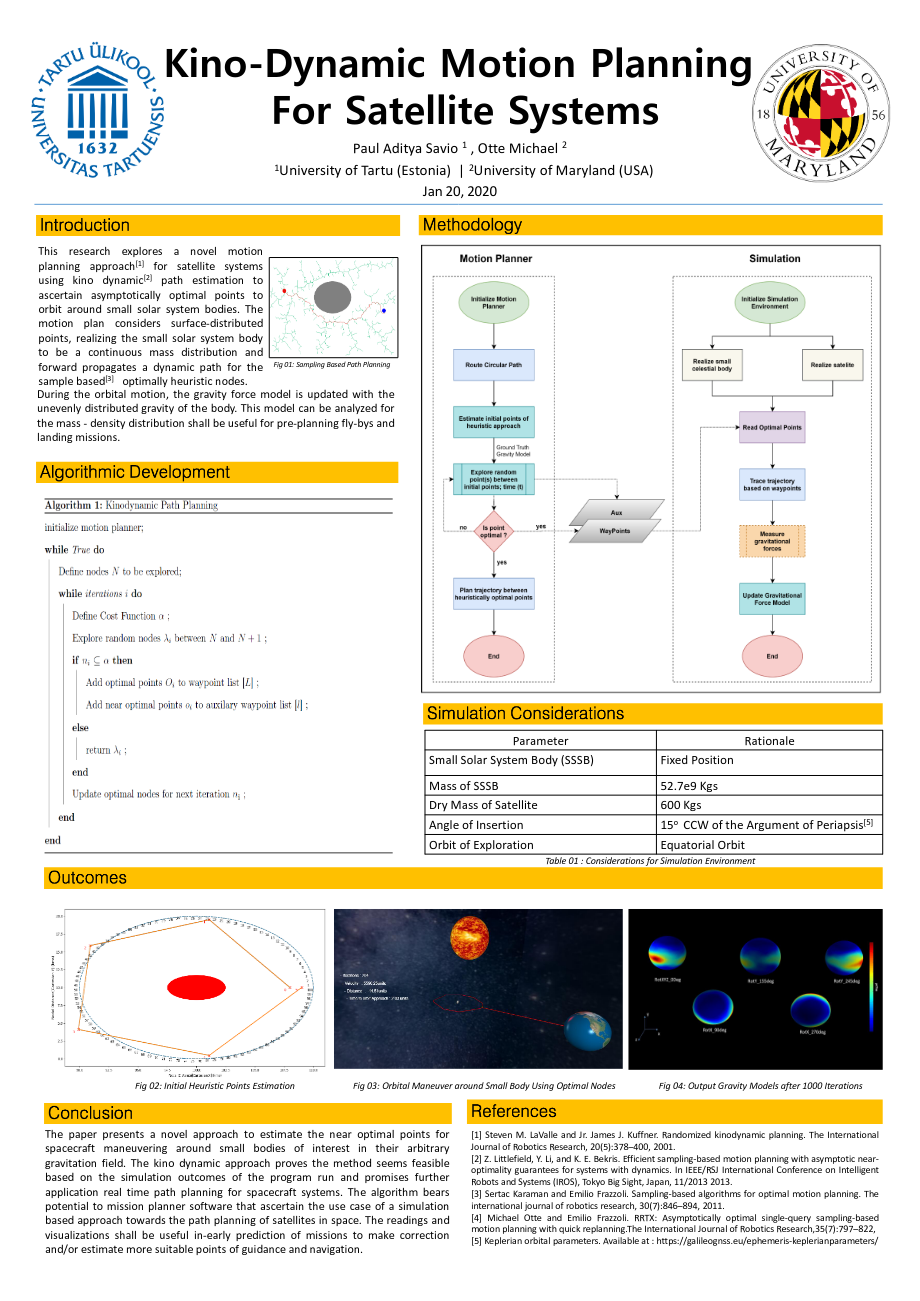
Kino-Dynamic Motion Planning for Satellite Systems.
Aditya Savio Paul and Michael Otte.
Finnish Satellite Workshop.
Helsinki, Finland, 2020.
Workshop Abstract.
Poster.
BibTeX.
@inproceedings{Paul.Otte.FSW20,
author = "Aditya Savio Paul and Michael Otte",
title = "Kino-Dynamic Motion Planning for Satellite Systems",
booktitle = "Finnish Satellite Workshop",
year = "2020"
}
Close
-
Sampling-based Volumetric Methods for Optimal Feedback Planning.
Dmitry Yershov, Michael Otte, and Emilio Frazzoli.
In IEEE International Conference on Robotics and Automation, Workshop on optimal robot motion planning (WORMP).
Seattle, WA, 2015.
Workshop Abstract.
Poster.
arXive Paper.
BibTeX.
@inproceedings{yershov_wormp15,
author = "Dmitry Yershov and Michael Otte and Emilio Frazzoli",
title = "Sampling-based Volumetric Methods for Optimal Feedback Planning.",
booktitle = "In IEEE International Conference on Robotics and Automation, Workshop on optimal robot motion planning (WORMP)",
year = "2015"
}
Close
-
Fast Collision Checking: From Single Robots to Multi-Robot Teams.
Joshua Bialkowski, Michael Otte, and Emilio Frazzoli.
In IEEE International Conference on Robotics and Automation,
Workshop on Crossing the Reality Gap - From Single to Multi- to Many Robot Systems (ICRA-CRG).
Karlsruhe, Germany. 2013.
Workshop Abstract.
arXive Paper.
BibTeX.
@inproceedings{bialkowski_icra_crg13,
author = "Joshua Bialkowski and Michael Otte and Emilio Frazzoli",
title = "Fast Collision Checking: From Single Robots to Multi-Robot Teams",
booktitle = "IEEE International Conference on Robotics and Automation: Crossing the Reality Gap - From Single to Multi- to Many Robot Systems (ICRA-CRG)",
year = "2013"
}
Close
-
The Any-Com Approach to Multi-Robot Coordination.
Michael Otte and Nikolaus Correll.
IEEE International Conference on Robotics and Automation,
Workshop on Network Science and Systems Issues in Multi-Robot Autonomy (ICRA-NETSS).
Anchorage, USA. 2010.
Paper.
Poster.
BibTeX.
@inproceedings{otte_icra_nss10,
author = "Michael Otte and Nikolaus Correll",
title = "The Any-Com Approach to Multi-Robot Coordination",
booktitle = "IEEE International Conference on Robotics and Automation: Network Science and Systems Issues in Multi-Robot Autonomy (ICRA-NETSS)",
year = "2010"
}
Close
-
Discovering the runtime structure of software with probabilistic generative models.
Scott Richardson, Michael Otte, Michael Mozer, Amer Diwan, and Dan Conners.
Neural Information Processing Systems Conference,
Workshop on Machine Learning for Systems Problems (NIPS-MLSP).
Whistler, Canada. 2007.
Poster.
BibTeX.
@inproceedings{richardson_nips_mlsp07,
author = "Scott Richardson and \textbf{Michael Otte} and Michael Mozer and Amer Diwan and Dan Conners",
title = "Discovering the runtime structure of software with probabilistic generative models",
booktitle = "Neural Information Processing Systems Conference: Workshop on Machine Learning for Systems Problems (NIPS-MLSP)",
address = "Whistler, Canada",
month = December,
year = "2007",
}
Close
Technical Reports
-
Control and Dynamic Motion Planning for a Hybrid Air-Underwater Quadrotor: Minimizing Energy Use in a Flooded Cave Environment.
Ilya Semenov, Robert Brown, Michael Otte.
arXiv:2301.00936.
2023.
Paper.
arXive Paper.
BibTeX.
@techreport{Semenov.etal.TR23,
author = "Ilya Semenov and Robert Brown and Michael Otte",
title = "Control and Dynamic Motion Planning for a Hybrid Air-Underwater Quadrotor: Minimizing Energy Use in a Flooded Cave Environment",
institution = "University of MAryland College Park",
year = "2023",
number = "arXiv:2301.00936"
}
Close
-
Modifying Dijkstra's Algorithm to Solve Many Instances of SSSP in Linear Time.
Michael Otte.
University of Colorado at Boulder Engineering and Applied Science Technical Report.
2015.
Paper.
BibTeX.
@techreport{Otte.techReport15,
author = "Michael Otte",
title = "Modifying Dijkstra's Algorithm to Solve Many Instances of SSSP in Linear Time",
institution = "University of Colorado at Boulder",
year = "2015",
number = "Spring-2015"
}
Close
-
New techniques for path planning in image space.
Michael W. Otte, Dan Knights, Joseph J. Pfeiffer III, Jane Mulligan, and Greg Grudic
University of Colorado at Boulder Technical Report #CU-CS-1052-09.
2009.
Paper.
BibTeX.
@techreport{otte_cu09,
author = "Michael Otte and Dan Knights and Joseph J. {Pfeiffer III} and Jane Mulligan and Greg Grudic",
title = "New techniques for path planning in image space",
institution = "University of Colorado at Boulder",
year = "2009",
type = "Technical Report",
number = "CU-CS-1052-09"
}
Close
-
An HMM applied to semi-online program phase analysis.
Michael Otte and Scott Richardson.
University of Colorado at Boulder Technical Report #CU-CS-1034-07. 2007.
Paper.
BibTeX.
@techreport{otte_cu07,
author = "Michael Otte and Scott Richardson",
title = "An HMM applied to semi-online program phase analysis",
institution = "University of Colorado at Boulder",
year = "2007",
type = "Technical Report",
number = "CU-CS-1034-07"
}
Close
PhD Thesis
-
Any-Com Multi-Robot Path Planning.
Michael Otte.
PhD Thesis.
University of Colorado at Boulder.
2011.
Dissertation.
BibTeX.
@phdthesis{otte_phd,
author = "Michael Otte",
title = "{Any-Com} Multi-Robot Path Planning",
school = "University of Colorado at Boulder",
year = "2011"
}
Close
Master's Thesis
-
Path planning in image space for the autonomous navigation of unmanned vehicles in unstructured outdoor environments.
Michael Otte.
Master's Thesis.
University of Colorado at Boulder.
2007.
Dissertation.
BibTeX.
@mastersthesis{otte_masters,
author = "Michael Otte",
title = "Path Planning in Image Space for the Autonomous Navigation of Unmanned Vehicles in Unstructured Outdoor Environments",
school = "University of Colorado at Boulder",
year = "2007"
}
Close
PhD Preliminary Exam
-
A Survey of Machine Learning Approaches to Robotic Path-Planning
Michael Otte.
PhD Preliminary Exam.
University of Colorado at Boulder.
2008.
Paper.
BibTeX.
@techreport{Otte.prelim08,
author = "Michael Otte",
title = "A Survey of Machine Learning Approaches to Robotic Path-Planning",
institution = "University of Colorado at Boulder",
year = "2008",
type = "Technical Report",
number = "PhD Preliminary Exam"
}
Close
|
{kind=link}