Motion and Teaming Laboratory (Mo-T Lab)
top
Mo-T Lab Alumni
Postdoctoral Alumni
-
George P. Kontoudis
Placement: Tenure Track Assistant Professor, Mechanical Engineering Department, Colorado School of Mines.
Personal Website.
Ph.D. Alumni
-
Sharan Nayak
(ENAE, 2023),
Ph.D. Dissertation: "Fast Feasible Motion Planning Without Two-Point Boundary Value Solution.''
Placement: Space Exploration Technologies Corporation (SpaceX).
Linkedin.
YouTube.
Master's of Science Alumni
-
Miles Jones
(ENAE, 2025),
M.S. Thesis: "Stigmergy-Based Multi-Agent Motion Planning using QR Codes"
Placement: Ongoing Research in the Mo-T Lab.
-
Rachel Blum
(ENAE, 2025),
Non-Thesis Option.
Placement: Ongoing Ph.D. student in the Mo-T Lab.
-
Dalan Loudermilk
(ENAE, 2025),
Non-Thesis Option.
Placement: Ongoing Ph.D. student in the Mo-T Lab.
-
Alex Mendelsohn
(CMCS, 2023),
Non-Thesis Option.
Placement: Ph.D. student in the Mo-T Lab.
-
Anshuman Singh
(ENSE, 2021, Co-Advised with Huan Xu),
M.S. Thesis: "Proof of concept for pair based approach for swarm robotics." Placement: Ulendo Software Solutions for Manufacturing Automation.
-
Loy McGuire
(ENAE, 2020),
M.S. Thesis ``Overcomming local minima through viscoelastic fluid-inspired swarm behavior.''
Placement: Ph.D. student in the Mo-T Lab.
-
Aditya Savio Paul
(University of Tartu, Estonia, 2020, External Co-Advisor),
M.S. Thesis: "Autonomous motion planning for spacecrafts near small solar systembodies: simultaneously refining the gravitational field model andre-planning gravity dependant maneuvers."
Placement: Tartu Observatory.
-
Sharan Nayak
(ENAE, 2020),
Non-Thesis Option.
Placement: Ph.D. student in the Mo-T Lab (ENAE, 2023), and now at SpaceX.
-
Akshay Vinay Bapat
(ENSE, 2020, Co-Advised with Jeffrey Herrmann),
M.S. Thesis: "Development of a multi-agent task allocation algorithm for low communication scenarios."
Placement: Magna International (Robotics Test Engineer).
-
Ryan Ernandis
(ENAE, 2020),
M.S. Thesis: "Sampling based motion planning for minimizing uncertainty with Stewart platforms."
Placement: Astrobotic
Master's of Engineering Alumni
-
Alkesh Kumar
(M.Eng. Robotics, 2023),
Placement: Temple University Ph.D. Program.
-
Manas Gupta
(M.Eng. Robotics, 2019, Co-Advised with Huan Xu),
Placement: Torc Robotics.
-
Shivang Patel
(M.Eng. Robotics, 2019, Co-Advised with Huan Xu),
Placement: University of West Verginia Ph.D. Program.
-
Pranav Dhulipala
(M.Eng. Robotics, 2019, Co-Advised with Huan Xu),
Placement: Microsoft.
Exchange Students Alumni
- Jae-Kyung Cho (Seoul National University)
Undergraduate Alumni
- Marvellous Achugbu
- Jared Allanigue
- Friedrich Alvarez
- James Bollinger
- Samuel Badalov
- Nigel Campbell-Christie (Morgan State University)
- Carolyn Catan
- Andres Christensen
- Charles Demery (Morgan State University)
- Justin DeVito
- Ayomikun Fadina (Capitol Technology University)
- Zachary Friedman-Hill
- Max Harris
- Zachary Hoover
- Neel Godhani
- Moshe Kashlinsky
- David Kirkpatrick
- Savya Konkalmatt
- Jordan Kreh
- Brian Lee
- Ryland Lillibridge
- Kevin Lin
- Darius Lukas
- Miles Jones
- Chris Martinez Reina
- Favour Madu
- Paul Motter
- Anish Nandyala
- Kaitlyn Reidy
- Hridoy Rozario
- Noah Schultz
- William Sherman
- Leon Stevenson
- Sneha Alicia Sunilkumar
- Jolicia Taylor
- Mya Thompkins (Morgan State University)
- Tom West
- Hans Yang
- Kevin Yen
- Richard Yu
High School Alumni
- The work done by our 19 previous and ongoing high school interns has been awesome! We error on the side of privacy with respect to listing the names of minors on-line. So, if you were/are a high school intern in the Mo-T Lab and would like to be listed here, and are now old enough to make that decision legally, then let Dr. Otte know and we will be happy to add you! Otherwise, if you are a minor and would like to be listed then please have your parent/legal guardian provide their permission via email to Dr. Otte and we will be happy to add you!
top
Facilities and Test Platforms
Indoor UAV Test Space
 |
- Vicon Motion Capture System
- Safety Nets
|
 |
- Various UAVs
- Platforms from: Bitcraze, Parrot, Intel, etc.
- Custom Platforms
|
kilobot Swarm Robot Testbed
 |
- 200+ robots
- Overhead Programmer (I/O, Controller)
- Overhead Light Projector
- Light Intensity Control
- Overhead Camera
- Multi-Robot Charging Station
|
 |
- Light Intensity Sensor
- Inferred Communication
- Vibration Based Locomotion
- Multicolor LED
|
Turtlebot3 Team
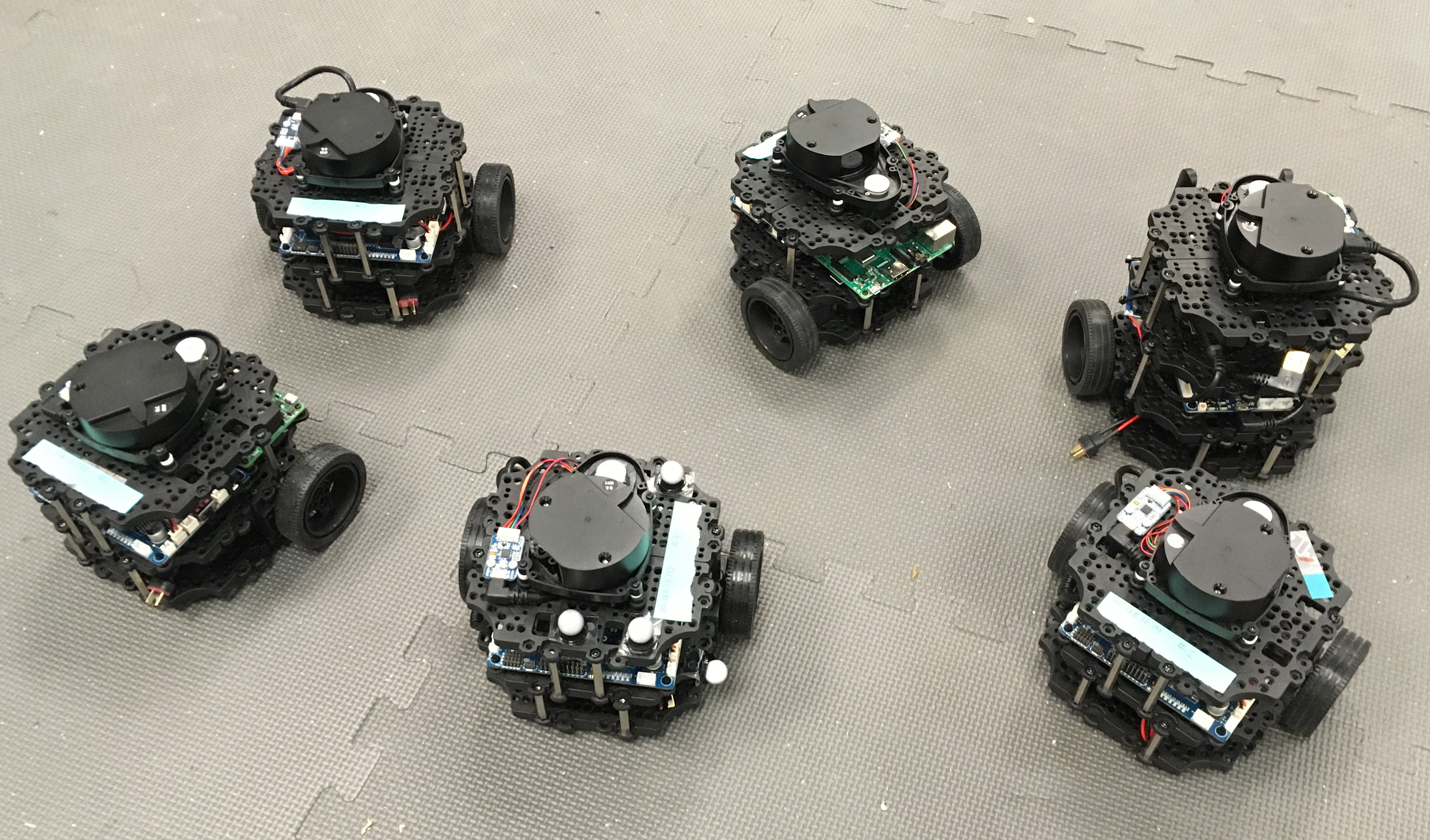 |
- 6 Turtlebot3 Burger platforms
- Laser Scanars
- Stereo Cameras
- RGB Cameras
- Custom Actuators
|
 |
|
Additional Shared Resources
|